Open-Source Internship opportunity by OpenGenus for programmers. Apply now.
Reading time: 35 minutes | Coding time: 15 minutes
In computational geometry, Chan's algorithm, named after Timothy M. Chan, is an optimal output-sensitive algorithm to compute the convex hull of a set P of n points, in 2- or 3-dimensional space. The algorithm takes O(n log h) time, where h is the number of vertices of the output (the convex hull).
In the planar case, the algorithm combines an O(nlogn) algorithm (Graham scan, for example) with Jarvis march (O(nh)), in order to obtain an optima O(nlogh) time. Chan's algorithm is notable because it is much simpler than the Kirkpatrick–Seidel algorithm, and it naturally extends to 3-dimensional space. This paradigm has been independently developed by Frank Nielsen in his Ph.D. thesis.
Overview
A single pass of the algorithm requires a parameter $m>=h$ to successfully terminate. Assume such a value is fixed (in practice, $h$ is not known beforehand and multiple passes with increasing values of $m$ will be used, see below).
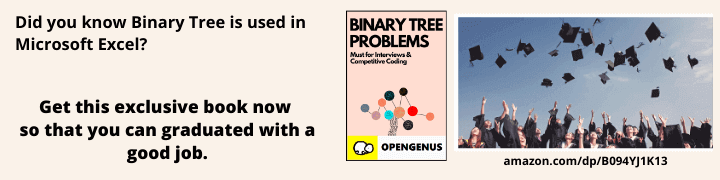
The algorithm starts by arbitrarily partitioning the set of points $P$ into $k<=1+n/m$ subsets$(Q_k)_{k=1,2,3...n}$ with at most $m$ points each; notice that $K=O(n/m)$.
For each subset $Q_k$, it computes the convex hull,$C_k$ ,using an $O(plogp)$ algorithm (for example, Graham scan), where $p$ is the number of points in the subset. As there are $K$ subsets of $O(m)$ points each,this phase takes $K.O(mlogm)=O(nlogm)$ time.
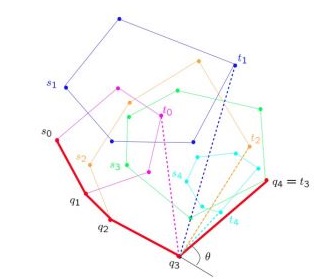
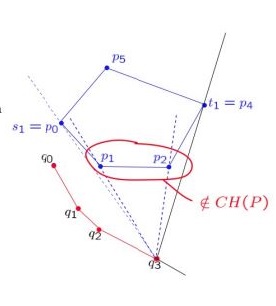
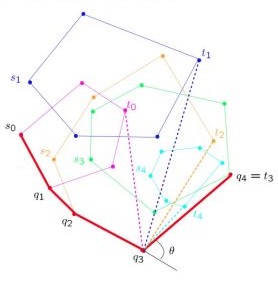
During the second phase, Jarvis's march is executed, making use of the precomputed (mini) convex hulls . At each step in this Jarvis's march algorithm, we have a point $p_i$ in the convex hull (at the beginning , $p_i$ may be the point in $P$ with the lowest y coordinate, which is guaranted to be in the convex hull of $P$ ), and need to find a point $p_{i+1} = f(p_i,P)$ such that all other points of P are to the right of the line $p_ip_{i+1}$ where the notation $p_{i+1} = f(p_i,P)$ simply means that the next point of the convex hull of $P$ , that is $p_{i+1}$ , is determined as a function of $p_i$ and $P$ .The convex hull of $Q_k , C_k$ is known and contains at most $m$ points(listed in a clockwise or counter-clockwise order), which allows to compute $f(p_i,Q_k)$ in $ O(logm)$ time by binary search. Hence ,the computation of $f(p_i,Q_k)$ for all the $K$ subsets can be done in $O(Klogm)$ time .Then we can determine $f(p_i,P)$ using the same technique as normally used in Jarvis's march, but only considering the points $(f(p_i,Q_k))$ (i.e.the points in the mini convex hulls) instead of whole set $P$ .For those points, one iteration of Jarvis's march is $O(K)$ which is negligible compared to the computation for all subsets. Jarvis's march completes when the process has been repeated $O(h)$ times (because, in the way Jarvis march works, after at most $h$ iterations of its outermost loop, where $h$ is the number of points in the convex hull of $P$, we must have found the convex hull), hence the second phase takes $O(Khlogm)$ time, equivalent to $O(nlogh)$ time if $m$ is close to $h$ .
By running the two phases described above, the convex hull of $n$ points is computed in $O(n logh)$ time.
Algorithm
Compute the $CH$ of $k$ subsets of $P$.
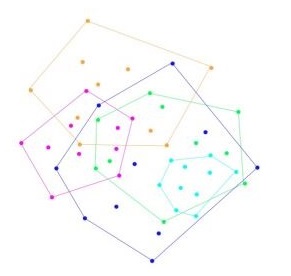
Wrap around the $CH$ of the $k$ subsets.
Compute the $CH$ of $k = n/m$ subsets of size $m$ : each in $O(mlogm)$,all in $k/m * O(mlogm) = O(nlogm)$.
Compute the $CH$ of $k = n/m$ subsets of size $m$ : each in $O(mlogm)$ , all in $k/m * O(mlogm) = O(n logm)$.
Find the $s_i$: $O(n)$.
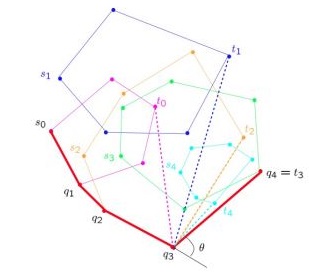
One wrapping step: find the bitangents $t_i$ on each subset:
$n/m + O(nb points visited)$
$=n/m + O(nb points removed)$
For h wrapping steps:
$O(hn/m + total points removed)$
$=O(hn/m + n)$
Total : $O(nlogm + hn/m + n) = O(n(1+h/m+logm))$
Set a parameter $H$ , call $h$ the actual size of convex hull of $P$.
Hull($P$,$H$,$H$)
Do $H$ wrapping steps
* If the last wrap comes back to the first point then return success
* Else return incomplete.
- Success if $H$ > $h$.
- Complexity of Hull($P$,$m$,$H$) is $O(nlogH)$.
Hull($P$)
For i = 1,2,..do
L = Hull(P,H,H) with m=H=min$(2^{2^i},n)$
If L is not incomplete then return L.
Complexity:
No. of iterations = $O(loglog h)$
Cost of $i^th$ iterations = $O(nlogH)$ = $O(n2^i)$.
Total: $O(n2^{loglogn+1})=O(nlogh)$.
Pseudocode
The pseudocode of Chan's algorithm is as follows:
1. The algorithm requires knowledge of CH size h.
2. Use m as proxy for h. For the moment , assume we know m = h.
3. Partition P into r groups of m each.
4. Compute Hull(Pi) using Graham scan , i = 1, 2, . . . , r.
5. p0 = (−∞, 0); p1 bottom point of P.
6. For k = 1 to m do
• Find qi ∈ Pi that maximizes the angle
6 pk−1pkqi.
• Let pk+1 be the point among qi that maximizes the angle 6 pk−1pkq.
• If pk+1 = p1 then return hp1, . . . , pki.
7. Return “m was too small, try again.”
Implementations
Following is the implementation of Chan's algorithm in C++:
- C++
C++
#include <iostream>
#include <stdlib.h>
#include <vector>
#include <algorithm> // For qsort() algorithm
#include <utility> // For pair() STL
#define RIGHT_TURN -1 // CW
#define LEFT_TURN 1 // CCW
#define COLLINEAR 0 // Collinear
using namespace std;
/* Class to handle the 2D points! */
class point
{
public:
int x;
int y;
point (int newx=0,int newy=0){
x=newx;
y=newy;
}
/*
Overloaded == operator to check for equality between 2 objects of class point
*/
friend bool operator== (const point& p1,const point& p2){
return (p1.x==p2.x && p1.y==p2.y);
}
/*
Overloaded != operator to check for non-equality between 2 objects of class point
*/
friend bool operator!= (const point& p1,const point& p2){
return (!(p1.x==p2.x && p1.y==p2.y));
}
/*
Overloaded ostream << operator to check for print object of class point to STDOUT
*/
friend ostream& operator<<(ostream& output,const point& p){
output<<"("<<p.x<<","<<p.y<<")";
return output;
}
}p0; // Global point class object
/*
Returns square of the distance between the two point class objects
@param p1: Object of class point aka first point
@param p2: Object of class point aka second point
*/
int dist(point p1, point p2)
{
return (p1.x - p2.x)*(p1.x - p2.x) + (p1.y - p2.y)*(p1.y - p2.y);
}
/*
Returns orientation of the line joining points p and q and line joining points q and r
Returns -1 : CW orientation
+1 : CCW orientation
0 : Collinear
@param p: Object of class point aka first point
@param q: Object of class point aka second point
@param r: Object of class point aka third point
*/
int orientation(point p, point q, point r)
{
int val = (q.y - p.y) * (r.x - q.x) - (q.x - p.x) * (r.y - q.y);
if (val == 0) return 0; // Collinear
return (val > 0)? -1: 1; // CW: -1 or CCW: 1
}
/*
Predicate function used while sorting the points using qsort() inbuilt function in C++
@param p: Object of class point aka first point
@param p: Object of class point aka second point
*/
int compare(const void *vp1, const void *vp2)
{
point *p1 = (point *)vp1;
point *p2 = (point *)vp2;
int orient = orientation(p0, *p1, *p2);
if (orient == 0)
return (dist(p0, *p2) >= dist(p0, *p1))? -1 : 1;
return (orient == 1)? -1: 1;
}
/*
Returns the index of the point to which the tangent is drawn from point p.
Uses a modified Binary Search Algorithm to yield tangent in O(log n) complexity
@param v: vector of objects of class points representing the hull aka the vector of hull points
@param p: Object of class point from where tangent needs to be drawn
*/
int tangent(vector<point> v,point p){
int l=0;
int r= v.size();
int l_before = orientation(p, v[0], v[v.size()-1]);
int l_after = orientation(p, v[0], v[(l + 1) % v.size()]);
while (l < r){
int c = ((l + r)>>1);
int c_before = orientation(p, v[c], v[(c - 1) % v.size()]);
int c_after = orientation(p, v[c], v[(c + 1) % v.size()]);
int c_side = orientation(p, v[l], v[c]);
if (c_before != RIGHT_TURN and c_after != RIGHT_TURN)
return c;
else if ((c_side == LEFT_TURN) and (l_after == RIGHT_TURN or l_before == l_after) or (c_side == RIGHT_TURN and c_before == RIGHT_TURN))
r = c;
else
l = c + 1 ;
l_before = -c_after;
l_after = orientation(p, v[l], v[(l + 1) % v.size()]);
}
return l;
}
/*
Returns the pair of integers representing the Hull # and the point in that Hull which is the extreme amongst all given Hull Points
@param hulls: Vector containing the hull points for various hulls stored as individual vectors.
*/
pair<int,int> extreme_hullpt_pair(vector<vector<point> >& hulls){
int h= 0,p= 0;
for (int i=0; i<hulls.size(); ++i){
int min_index=0, min_y = hulls[i][0].y;
for(int j=1; j< hulls[i].size(); ++j){
if(hulls[i][j].y < min_y){
min_y=hulls[i][j].y;
min_index=j;
}
}
if(hulls[i][min_index].y < hulls[h][p].y){
h=i;
p=min_index;
}
}
return make_pair(h,p);
}
/*
Returns the pair of integers representing the Hull # and the point in that Hull to which the point lpoint will be joined
@param hulls: Vector containing the hull points for various hulls stored as individual vectors.
@param lpoint: Pair of the Hull # and the leftmost extreme point contained in that hull, amongst all the obtained hulls
*/
pair<int,int> next_hullpt_pair(vector<vector<point> >& hulls, pair<int,int> lpoint){
point p = hulls[lpoint.first][lpoint.second];
pair<int,int> next = make_pair(lpoint.first, (lpoint.second + 1) % hulls[lpoint.first].size());
for (int h=0; h< hulls.size(); h++){
if(h != lpoint.first){
int s= tangent(hulls[h],p);
point q= hulls[next.first][next.second];
point r= hulls[h][s];
int t= orientation(p,q,r);
if( t== RIGHT_TURN || (t==COLLINEAR) && dist(p,r)>dist(p,q))
next = make_pair(h,s);
}
}
return next;
}
/*
Constraint to find the outermost boundary of the points by checking if the points lie to the left otherwise adding the given point p
Returns the Hull Points
@param v: Vector of all the points
@param p: New point p which will be checked to be in the Hull Points or not
*/
vector<point> keep_left (vector<point>& v,point p){
while(v.size()>1 && orientation(v[v.size()-2],v[v.size()-1],p) != LEFT_TURN)
v.pop_back();
if(!v.size() || v[v.size()-1] != p)
v.push_back(p);
return v;
}
/*
Graham Scan algorithm to find convex hull from the given set of points
@param points: List of the given points in the cluster (as obtained by Chan's Algorithm grouping)
Returns the Hull Points in a vector
*/
vector<point> GrahamScan(vector<point>& points){
if(points.size()<=1)
return points;
qsort(&points[0], points.size(), sizeof(point), compare);
vector<point> lower_hull;
for(int i=0; i<points.size(); ++i)
lower_hull = keep_left(lower_hull,points[i]);
reverse(points.begin(),points.end());
vector<point> upper_hull;
for(int i=0; i<points.size(); ++i)
upper_hull = keep_left(upper_hull,points[i]);
for(int i=1;i<upper_hull.size();++i)
lower_hull.push_back(upper_hull[i]);
return lower_hull;
}
/*
Implementation of Chan's Algorithm to compute Convex Hull in O(nlogh) complexity
*/
vector<point> chansalgorithm(vector<point> v){
for(int t=0; t< v.size(); ++t){
for(int m=1; m< (1<<(1<<t)); ++m){
vector<vector<point> > hulls;
for(int i=0;i<v.size();i=i+m){
vector<point> chunk;
if(v.begin()+i+m <= v.end())
chunk.assign(v.begin()+i,v.begin()+i+m);
else
chunk.assign(v.begin()+i,v.end());
hulls.push_back(GrahamScan(chunk));
}
cout<<"\nM (Chunk Size): "<<m<<"\n";
for(int i=0;i<hulls.size();++i){
cout<<"Convex Hull for Hull #"<<i<<" (Obtained using Graham Scan!!)\n";
for(int j=0; j<hulls[i].size();++j)
cout<<hulls[i][j]<<" ";
cout<<"\n";
}
vector<pair<int,int> > hull;
hull.push_back(extreme_hullpt_pair(hulls));
for(int i=0; i<m; ++i){
pair<int,int> p= next_hullpt_pair(hulls,hull[hull.size()-1]);
vector<point> output;
if(p==hull[0]){
for(int j=0; j<hull.size();++j){
output.push_back(hulls[hull[j].first][hull[j].second]);
}
return output;
}
hull.push_back(p);
}
}
}
}
int main()
{
int T=0,x=0,y=0;
cin>>T;
if(T<=0)
return -1;
point points[T];
for(int i=0;i<T;++i){
cin>>x>>y;
points[i].x=x;
points[i].y=y;
}
vector<point> v(points,points+T);
vector<point> output = chansalgorithm(v);
cout<<"\n---------After Using Chan's Algorithm---------------\n";
cout<<"\n***************** CONVEX HULL **********************\n";
for(int i=0; i< output.size(); ++i)
cout<<output[i]<<" ";
cout<<"\n";
return 0;
}
Complexity
- Worst case time complexity:
Θ(N log H) - Average case time complexity:
Θ(N log H) - Best case time complexity:
Θ(N log H) - Space complexity:
Θ(N)
The algorithm takes O(nlogh) time, where h is the number of vertices of the output (the convex hull). The algorithm combines an O(nlogn) algorithm (Graham scan, for example) with Jarvis march (O(nh)), in order to obtain an optimal O(nlog h) time .
Applications
The applications of this Divide and Conquer approach towards Convex Hull is as follows:
- Collision avoidance: If the convex hull of a car avoids collision with obstacles then so does the car. Since the computation of paths that avoid collision is much easier with a convex car, then it is often used to plan paths.

-
Smallest box: The smallest area rectangle that encloses a polygon has at least one side flush with the convex hull of the polygon, and so the hull is computed at the first step of minimum rectangle algorithms. Similarly, finding the smallest three-dimensional box surrounding an object depends on the 3D-convex hull.
-
Shape analysis: Shapes may be classified for the purposes of matching by their "convex deficiency trees", structures that depend for their computation on convex hulls.
-
Other practical applications are pattern recognition, image processing, statistics, geographic information system, game theory, construction of phase diagrams, and static code analysis by abstract interpretation.
-
It also serves as a tool, a building block for a of other computational-geometric algorithms such as the rotating calipers method for computing the width and diameter of a point set.