
In this article, we have covered Idea of Approximate algorithms for NP problems. NP problems are tough but Approximate algorithms are considered to be a good approach as we get a answer close to the real answer in reasonable time. We have covered the basics with examples of problems like Bin Packing.
Table of content:
- Introduction to P, NP, NP-Hard and more
- Approximation algorithms for NP
- The quality of an approximation
- Approximation algorithms with small additive error
- Problems having polynomial approximation schemes
- Optimization problems with constant-factor approximations
- Hard-to-approximate problems
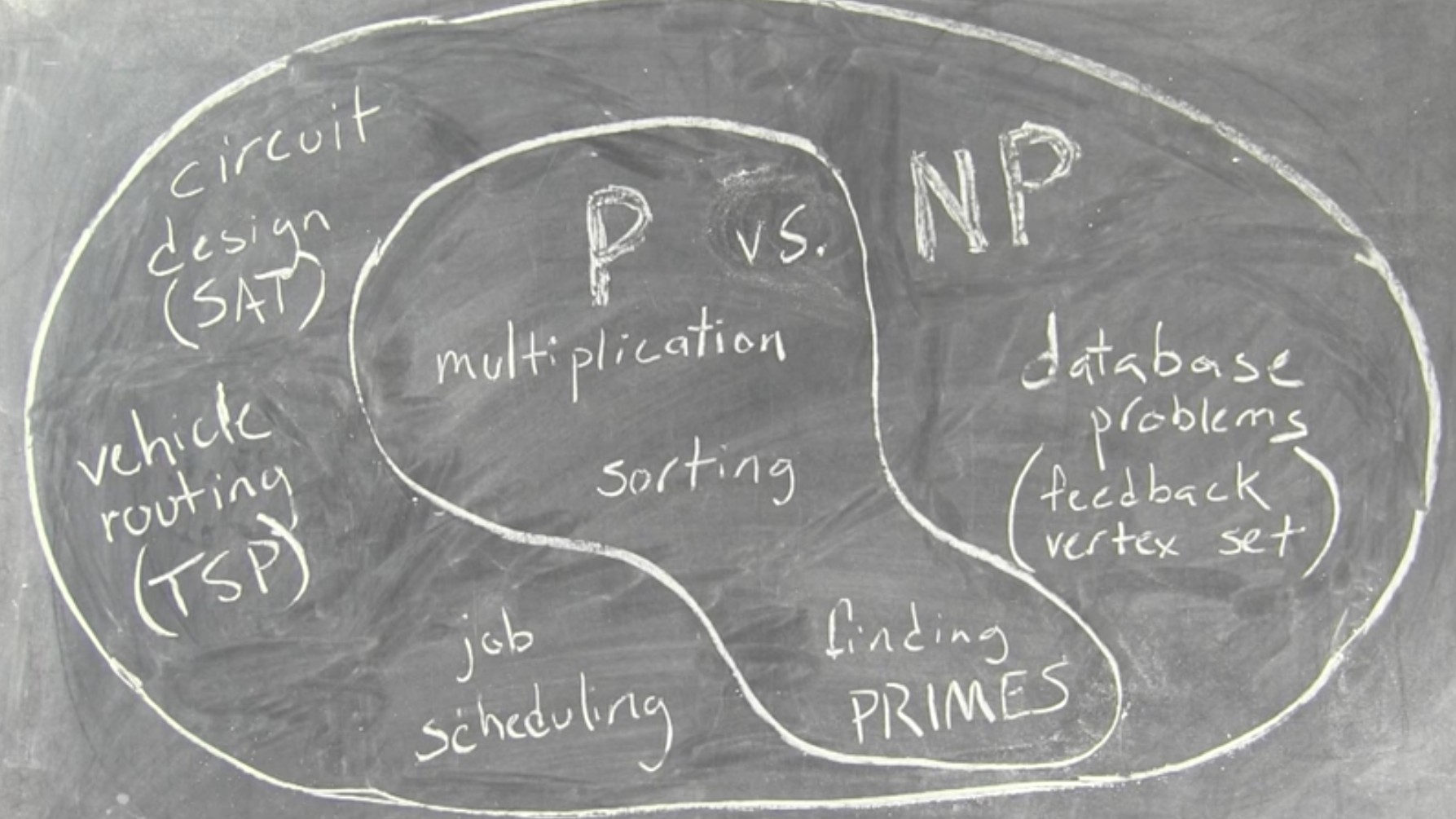
Introduction to P, NP, NP-Hard and more
Take a look at this picture which captures the complete idea:
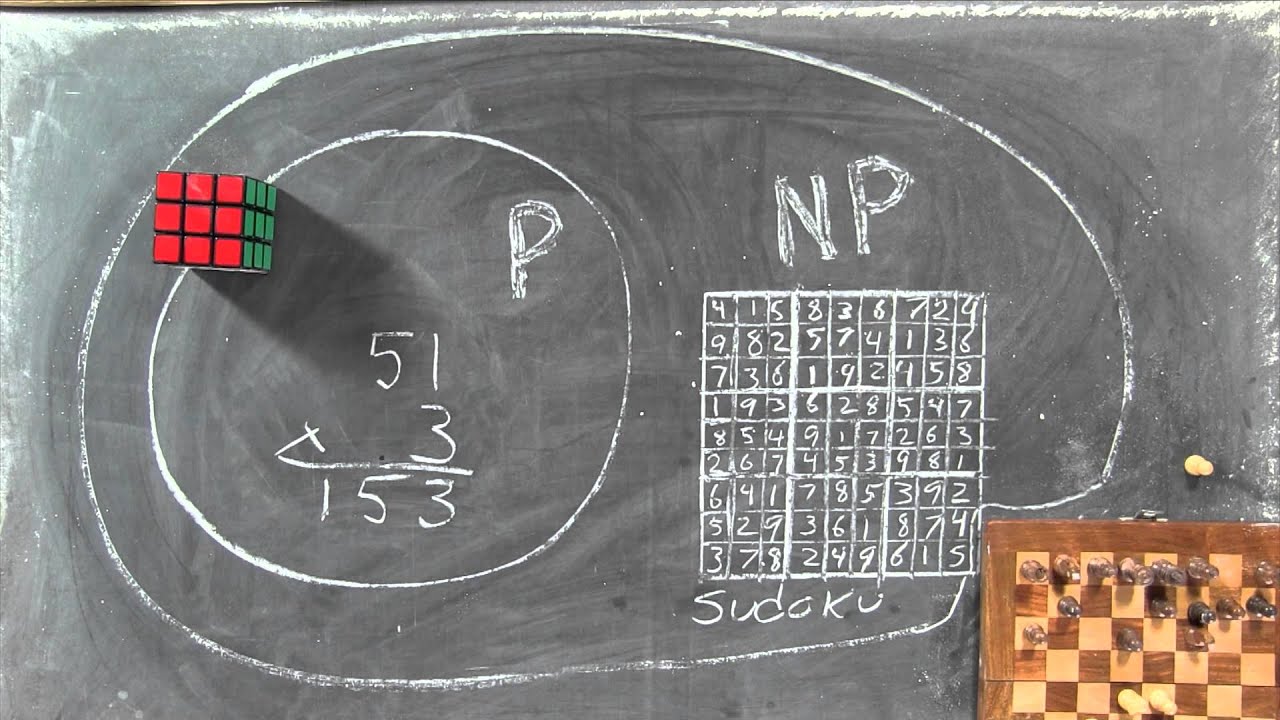
P:
- The class of problems that have polynomial-time deterministic algorithms. (solvable in a reasonable amount of time)
- Set of problems that can be solved in polynomial time.
NP:
- The class of problems that are solvable in polynomial time on a non-deterministic algorithms.
- Set of problems for which a solution can be verified in polynomial time.
P VS NP
- If the solution to a problem is easy to check for correctness, must the problem be easy to solve?
- P is subset of NP. Any problem that can be solved by deterministic machine in polynomial time can also be solved by non-deterministic machine in polynomial time.
NP - HARD
- Problems that are "at least as hard as the hardest problems in NP".
NP-completeness
- Problems for which the correctness of each solution can be verified quickly and a brute-force search algorithm can actually find a solution by trying all possible solutions.
Approximation algorithms for NP
-
Approximation algorithms are efficient algorithms that find approximate solutions to optimization problems with provable guarantees on the distance of the returned solution to the optimal one.
-
An optimization problem consists in finding the best (cheapest, heaviest, etc.) element in a large set P, called the feasible region.
-
Many problems of practical significance are NP-complete but are too important to abandon merely because obtaining an optimal solution is intractable.
-
If a problem is NP-complete, we are unlikely to find a polynomial-time algorithm for solving it exactly, but this does not imply that all hope is lost.
-
There are two approaches to getting around NP-completeness. First, if the actual inputs are small, an algorithm with exponential running time may be perfectly satisfactory.
-
Second, it may still be possible to find near-optimal solutions in polynomial time (either in the worst case or on the average). In practice, near-optimality is often good enough. An algorithm that returns near-optimal solutions is called an approximation algorithm.
-
Depending on the problem, an optimal solution may be defined as one with maximum possible cost or one with minimum possible cost; the problem may be a maximization or a minimization problem.
The quality of an approximation
-
In any combinatorial optimization problem, there is some objective function we are supposed to optimize.
-
The approximation ratio (or approximation factor) of an algorithm is the ratio between the result obtained by the algorithm and the optimal cost or profit.
-
Typically this ratio is taken in whichever direction makes it bigger than one.
-
An algorithm with approximation ratio k is called a k-approximation algorithm.
-
When the approximation ratio is close to 1, it is often more useful to look at the approximation error, which is defined as the approximation ratio minus 1.
-
A family of algorithms that can achieve any constant approximation error in polynomial time is called a polynomial-time approximation scheme or PTAS.
Approximation algorithms with small additive error
To illustrate Approximation algorithms with small additive error, we have covered 3 problems:
- Edge Coloring
- Bin Packing
- Randomized rounding and linear programming
Edge Coloring
-
Edge Coloring: Given a graph, color its edges with a minimum number of colors so that, for each vertex, the edges incident to that vertex are all different colors.
-
For this problem, it is easy to find a witness.
-
For any graph G, let v be the vertex of highest degree in G.
-
Clearly one needs to assign at least degG(v) colors to the edges of G, for otherwise there would be two edges with the same color incident to v.
-
For any graph G, there is an edge coloring using a number of colors equal
to one plus the degree of G. -
The proof of this fact translates into a polynomial-time algorithm that approximates the minimum edge-coloring to within an additive error of 1.
-
Most efficient algorithm which edge-colors a simple graph G with n vertices and m edges, and at most
A(G) + 1colors inO(m * sqrt(nlogn))time. -
Here A(G) represents maximum degree of graph G.
-
For a multigraph time complexity would be
O(m * (A(G) + n)). -
The polynomial time algorithm having the best approximate ratio
so far was given by Nishizeki and Kashiwagi, whose approximation ratio is asymptotically1.
Bin Packing
-
Bin Packing: The input consists of a set of positive numbers less than 1.
-
A solution is a partition of the numbers into sets summing to no more than 1.
-
The goal is to minimize the number of blocks of the partition.
-
There are approximation algorithms for bin packing that have very good performance guarantees.
-
The first fit algorithm provides a fast but often non-optimal solution, involving placing each item into the first bin in which it will fit. It requires Θ(n log n) time, where n is the number of items to be packed.
-
A reduction from the partition problem shows that there can be no approximation algorithm with absolute approximation ratio smaller than
3/2unless P = NP. -
On the other hand, it is solvable in pseudo-polynomial time for any fixed number of bins K, and solvable in polynomial time for any fixed bin capacity B.
Randomized rounding and linear programming
-
Linear programming is a method to achieve the best outcome in a mathematical model whose requirements are represented by linear relationships.
-
Linear programming is a special case of mathematical programming.
-
Linear programming problem is any optimization problem in which the feasible region corresponds to assignments of values to variables meeting a set of linear inequalities and in which the objective function is a linear function.
-
This is the general randomized-rounding :
-
Formulate the original NP-hard problem as an integer linear programming problem (IP).
-
Relax the program IP to obtain a linear program (LP).
-
Solve the linear program, obtaining a fractional solution.
-
Randomly round the fractional solution to obtain an approximately optimal integer solution
Problems having polynomial approximation schemes
-
The running time of the knapsack approximation scheme depends polynomially on 1/e.
-
Such a scheme is called a fully polynomial approximation scheme.
-
Covering with Disks: Find a minimum set of area-1 disks (or squares, etc.) covering all the points.
-
Euclidean Traveling Salesman: Find a closed loop passing through each of the points and having minimum total arc length.
-
Maximum-Weight Independent Set: Find a maximum-weight set of vertices, no two of which are adjacent.
-
Minimum-Weight Vertex Cover: Find a minimum-weight set of vertices such that every edge is incident to at least one of the vertices in the set.
Optimization problems with constant-factor approximations
-
Traveling Salesman: Given a complete graph with edge weights satisfying the triangle inequality, find a minimum-length path that visits every vertex of the graph.
-
MAX-CUT: Given a graph, partition the vertices of the input graph into two sets so as to maximize the number of edges with endpoints in distinct sets.
-
Steiner Tree: Given an undirected graph with positive edge-weights and a subset of the vertices called terminals, find a minimum-weight set of edges through which all the terminals are connected.
Multi-criteria problems
-
In many applications, there are two or more objective functions to be considered.
-
There have been some approximation algorithms developed for such multi-criteria optimization problems.
-
Several problems, such as the k-cluster problem, can be viewed as a bi-criteria problem.
-
Scheduling unrelated parallel machines with costs: for a given budget on cost, jobs are assigned to machines in such a way that the cost of the assignment is under budget and the makespan of the schedule is nearly minimum.
Hard-to-approximate problems
-
For some optimization problems, worst-case performance guarantees are unlikely to be possible.
-
It is NP-hard to approximate these problems even if one is willing to accept very poor performance guarantees.
-
Following are some examples :
-
Maximum Clique: Given a graph, find a largest set of vertices that are pairwise adjacent.
-
To find a maximum clique, one can systematically inspect all subsets, but this sort of brute-force search is too time-consuming to be practical for networks comprising more than a few dozen vertices.
-
All the maximal cliques generated are output in a tree-like form.
-
Subsequently, we prove that its worst-case time complexity is O(3^(n/3)) for an n-vertex graph.
-
This is optimal as a function of n, since there exist up to 3^(n/3) maximal cliques in an n-vertex graph.
-
The algorithm is also demonstrated to run very fast in practice by computational experiments.
-
Minimum Vertex Coloring: Given a graph, color the vertices with a minimum number of colors so that adjacent vertices receive distinct colors.
-
Longest Path: Given a graph, find a longest simple path.
-
Max Linear Satisfy: Given a set of linear equations, find a largest possible subset that are simultaneously satisfiable.
"I hope you enjoyed this article at OpenGenus, and was useful for you all"!!
Thank you all!